Система поиска по GPS.
Поскольку ракеты могут улетать достаточно далеко от места старта, необходимо применение систем поиска. В разработке система поиска, основанная на том, что в ракете стоит модуль GPS, который по протоколу UART выдает данные на радиотрансмиттер, передающий эти данные по радиоканалу. Приёмник, находящийся у оператора, принимает эти данные, и передаёт либо:
- по протоколу UART на модуль BlueTooth, который, в свою очередь, передаёт их на телефон или планшет с ОС Android, который показывает на карте местоположение ракеты.
- по протоколу UART на модуль USB, который, в свою очередь, передаёт их на ноутбук с ОС Windows, который показывает на карте местоположение ракеты.
Общая схема выглядит так:

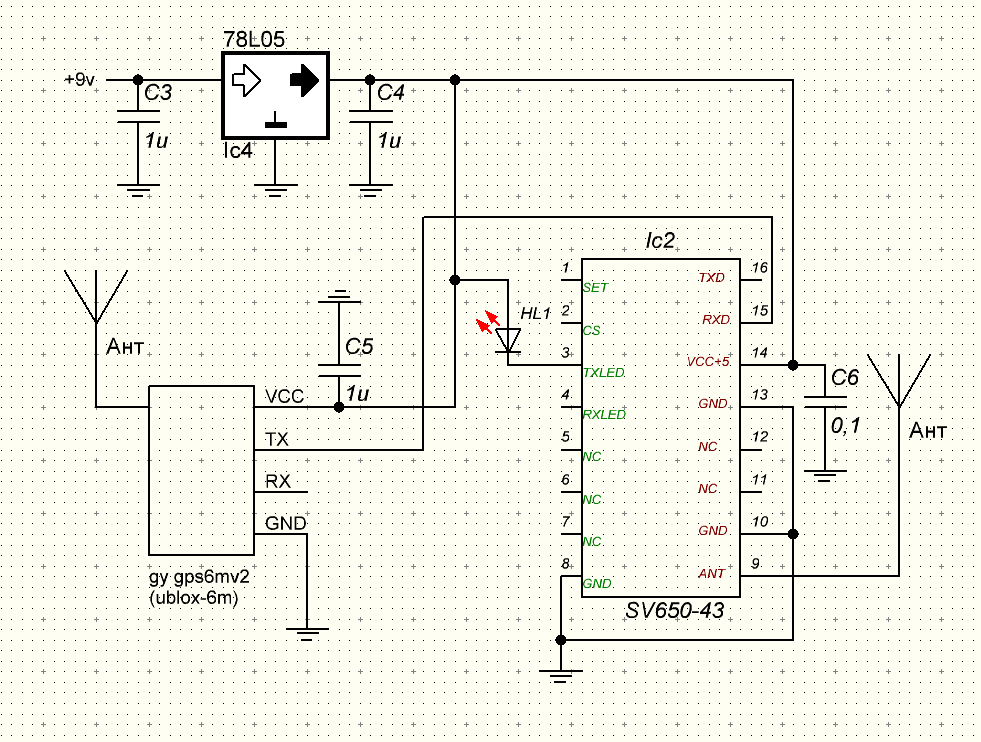
Схемы принципиальные блоков приёмника и передатчика:
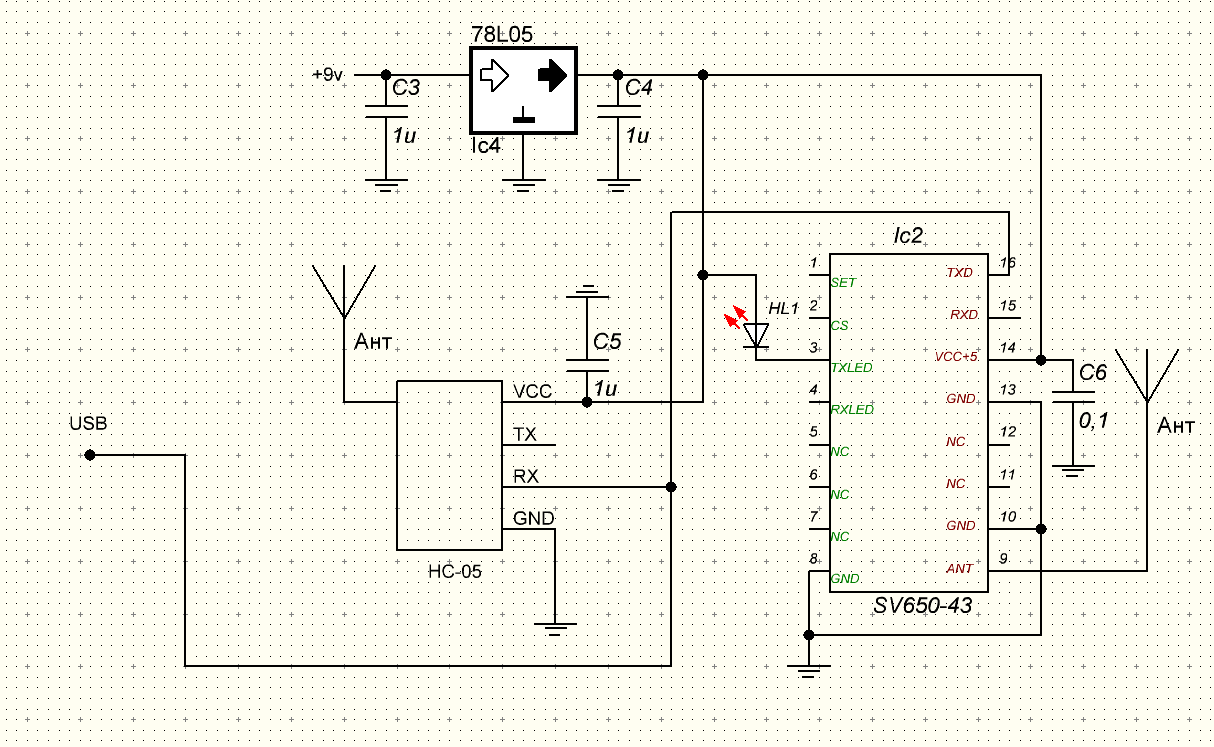
В качестве приемника и передатчика на 1 вт используются трансиверы фирмы NiceRF SV-651

GPS-сигнал принимает модуль Ublox Neo-6m и передает на трансивер по протоколу UART.
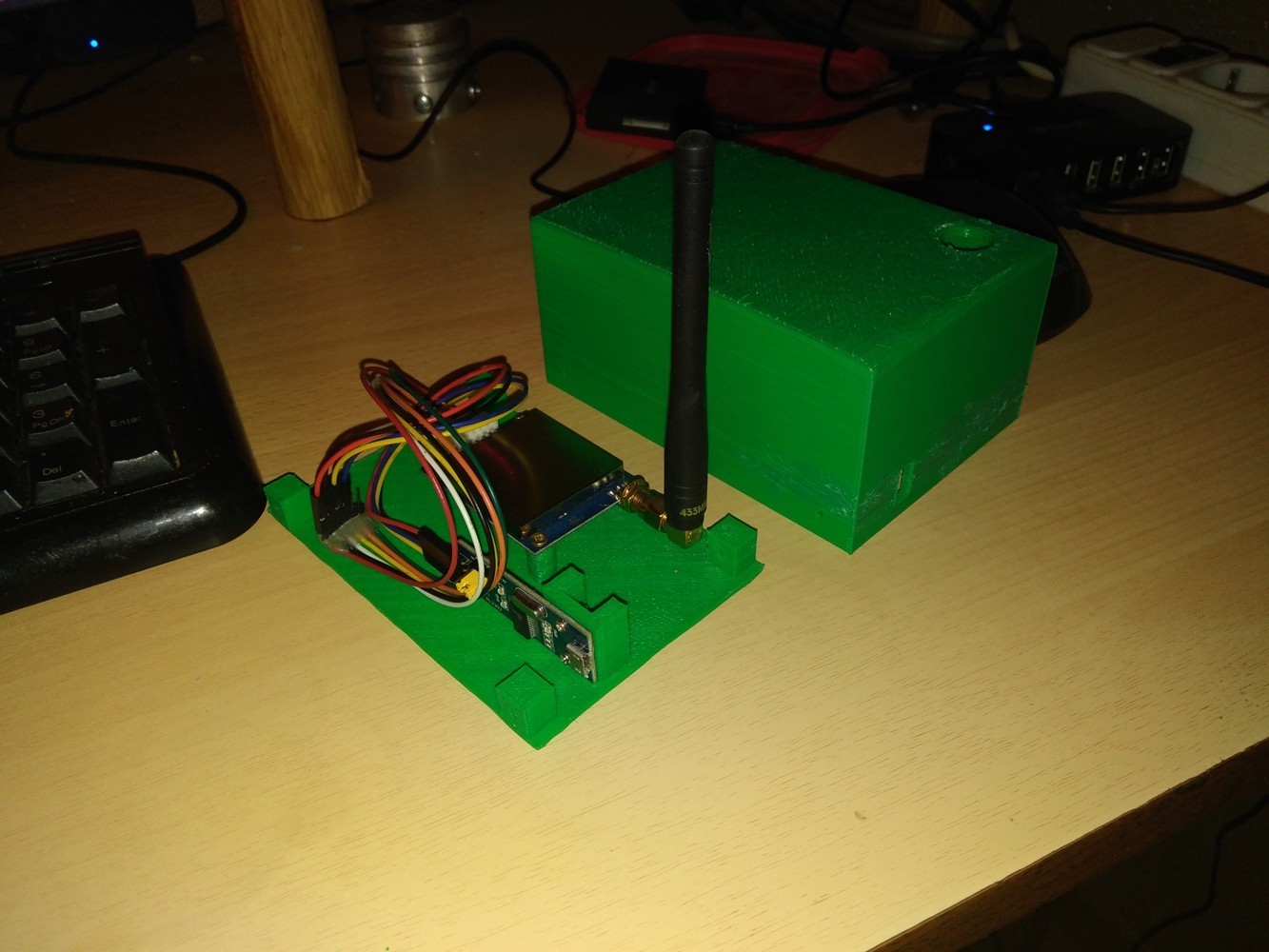
Передающая часть в сборе:


На приёмной стороне трансивер получает сигнал и через преобразователь UART-USB передает его на компьютер. Там он отслеживается программой SAS-Planet и показывает на карте местоположение передатчика с частотой в 1-3 сек.
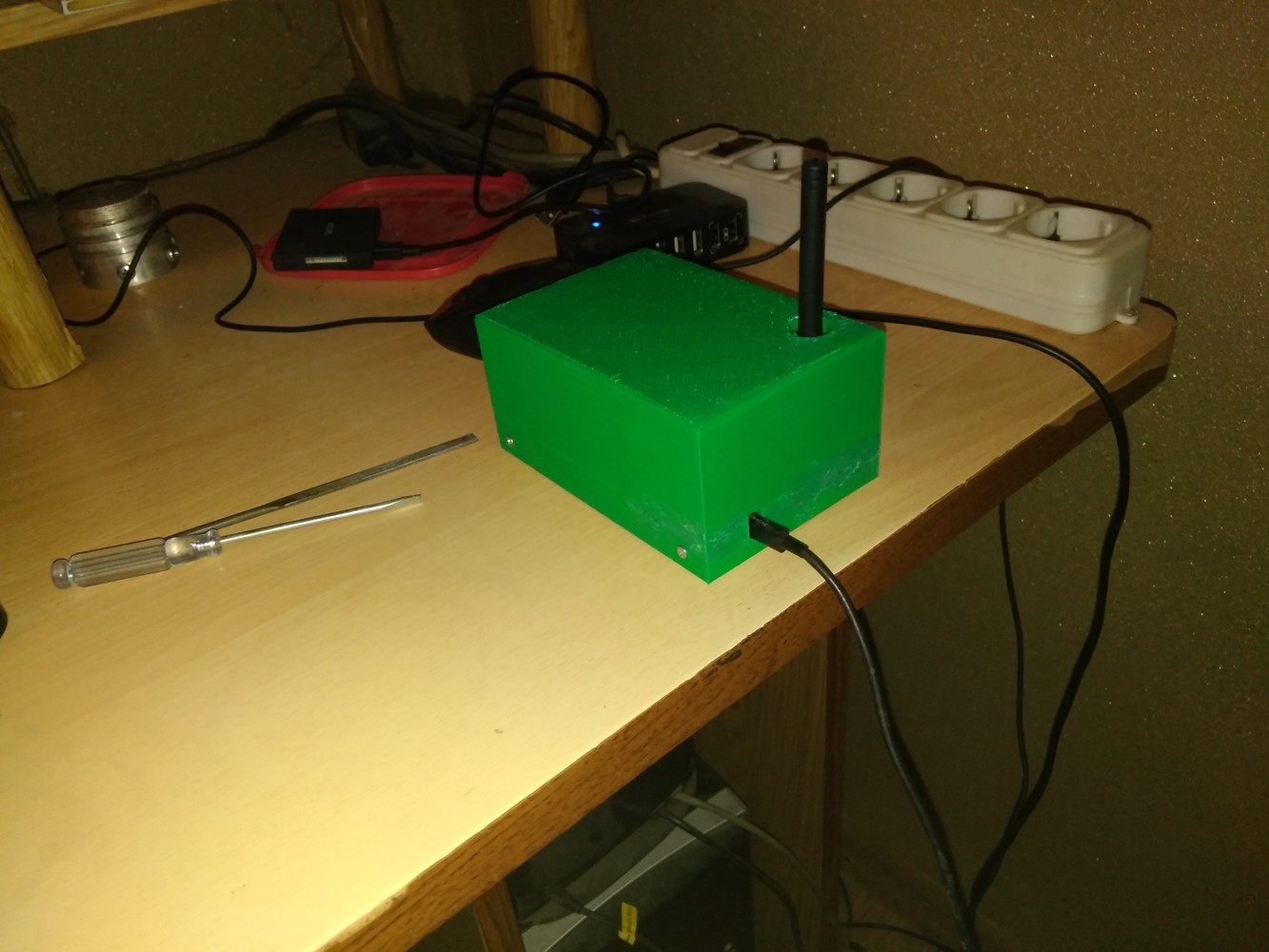
Приемная часть в сборе:
Статическая проверка поиска.
Проверка поиска в городской застройке.