Устройство управления полётом для проекта НР-1
Устройство управления полётом выполняет следующие функции:
-Измеряет и записывает во внешнюю память для последующего использования данные высоты полёта.
-Измеряет и записывает во внешнюю память для последующего использования данные ускорения при полёте.
-Записывает во внунтернюю память коды давления для управления полётом.
-Определяет апогей и осуществляет выброс тормозного парашюта.
-Определяет приближение к земле и осуществляет выброс основного парашюта.
-Включает звуковой сигнал для облегчения поиска ракеты.
Устройство управляется схемой на микроконтроллере Atmega8.
Схема принципиальная устройства.

Принципы работы.
Устройство работает на микропроцессоре Atmega8. Данные снимаются с датчика давления MPX4115A и акселерометра MMA2202D. Данные кода суммируются 64 раза, и полученное значение записывается во внешнюю память 24LC256-I/P (поочередно: код давления - 2 байта, код ускорения - 2 байта) для последующей передачи по UART на com-порт компьютера, а также в кольцевой буфер в SRAM для анализа событий управления.
Алгоритм работы.
При включении питания загорается светодиод HL5.
1. Режим полёта.
Для этого нужно нажать кнопку S4, на 3 секунды зажжется светодиод HL4, ожидая, пока закончатся все переходные процессы, и затем он будет мигать в частотой 1 Гц. Программа запоминает текущую высоту, и ожидает, когда ракета поднимется на 50 м (настраивается, для лифта - 10м). После этого события зажигается HL6, и программа включает модуль поиска апогея. Его принцип следующий: апогей считается достигнутым, когда текущее значение кода будет больше значения кода, взятого 1 секунду назад (настраивается, для лифта - 4 сек). (Соответственно, высоты - меньше).
Как только это произошло, на 3 секунды открывается транзистор T2 и срабатывает первый парашют. Затем программа ждёт ещё 3 секунды (настраивается) и включает алгоритм поиска времени включения второго парашюта и звукового сигнала. Это происходит в 50 м от земли (настраивается, для лифта - 10м).
2.Режим передачи данных.
Для этого нужно нажать кнопку S5, с предварительно запущенной программой ComData, ожидающей ввода. (Описана здесь). В результате данные из внешней памяти записываются в сыром виде в файл c:\Comdata.csv. Для их обработки и перевода в высоту рекомендуется:
1. Формула из Datasheet на MPX4115A для перевода кода в давление: P = ((5 * code / (1023 * 64)) / 5.1 + 0.095) * 1000 / 0.009
2. Формула барометрического нивелирования, для определения разницы высот: dH = -18400 * (1 + 0.003665 * t(c)) * Log10(P/P0)
...
Программное обеспечение.
Внешний вид.
Плата контроллера с обвеской и во временном корпусе для тестирования.

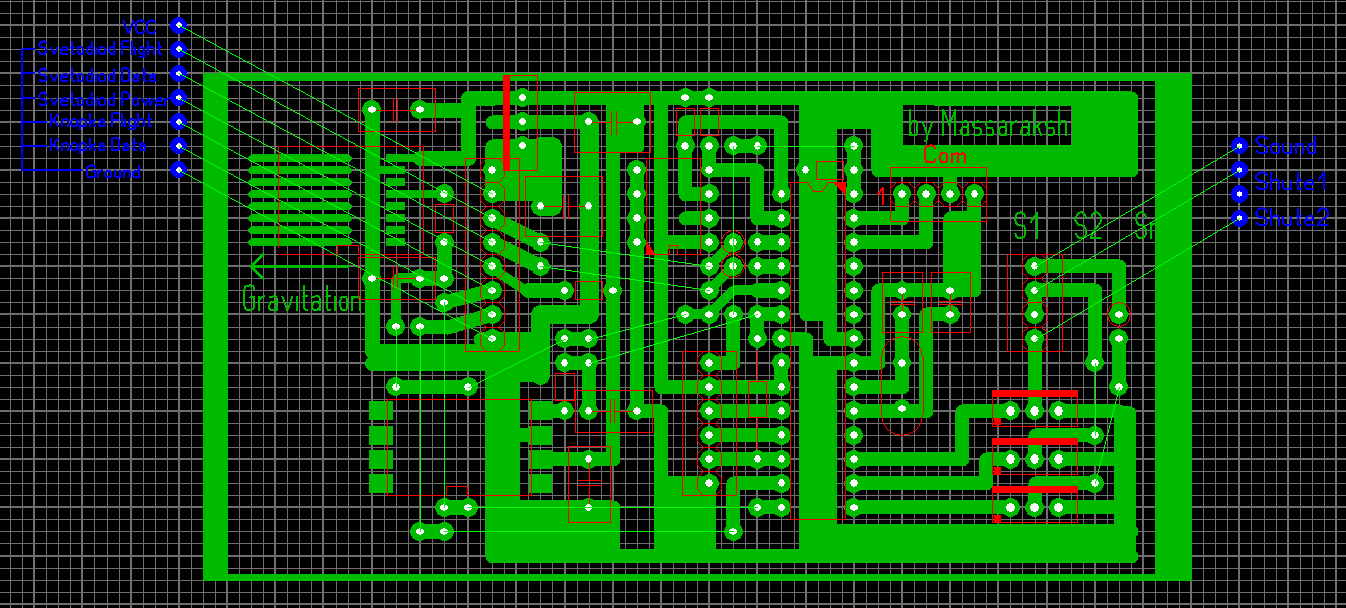
Плата в layout
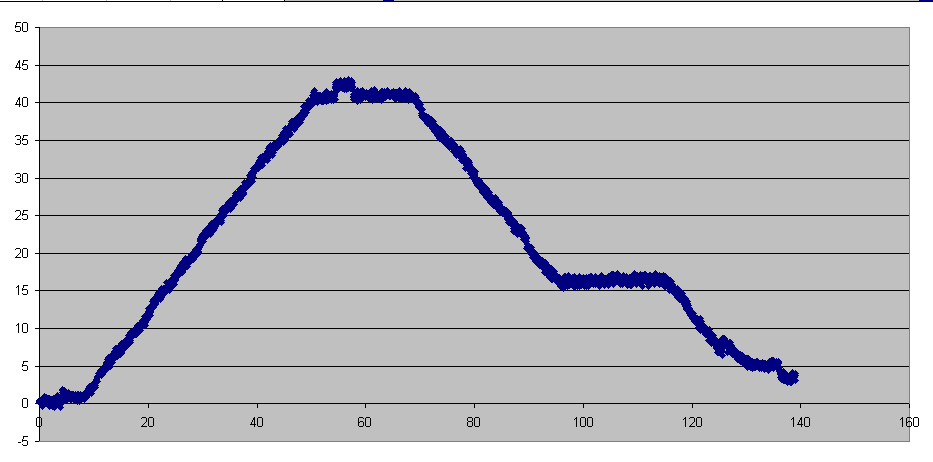
Испытание
Поездка на лифте на 15 этаж и обратно показала, что все системы работают штатно.